Building a humanoid robot from scratch has long been a dream shared by robotics enthusiasts, researchers, and engineers worldwide. In January 2026, RoboParty made this dream accessible to everyone by open-sourcing Roboto Origin, recognized by WorldKings as the world’s first-tier full-stack open-source bipedal humanoid robot.
This comprehensive guide breaks down the complete Bill of Materials (BOM) for Roboto Origin, offering insights into robot component selection, manufacturing costs, and practical sourcing strategies. Whether you’re planning to replicate the robot exactly or build a customized version, this BOM analysis provides the roadmap you need.
Key Highlights:
Optimized for DIY assembly, research, and educational applications
Total hardware cost: approximately ¥49,804 CNY (~$7,000 USD)
34kg lightweight design with 20 degrees of freedom (DOF)
Full-stack open-source: hardware + software completely transparent
Understanding Roboto Origin’s Architecture
Before diving into the BOM details, let’s understand what makes this robot special:
Technical Specifications
| Parameter | Specification |
|---|---|
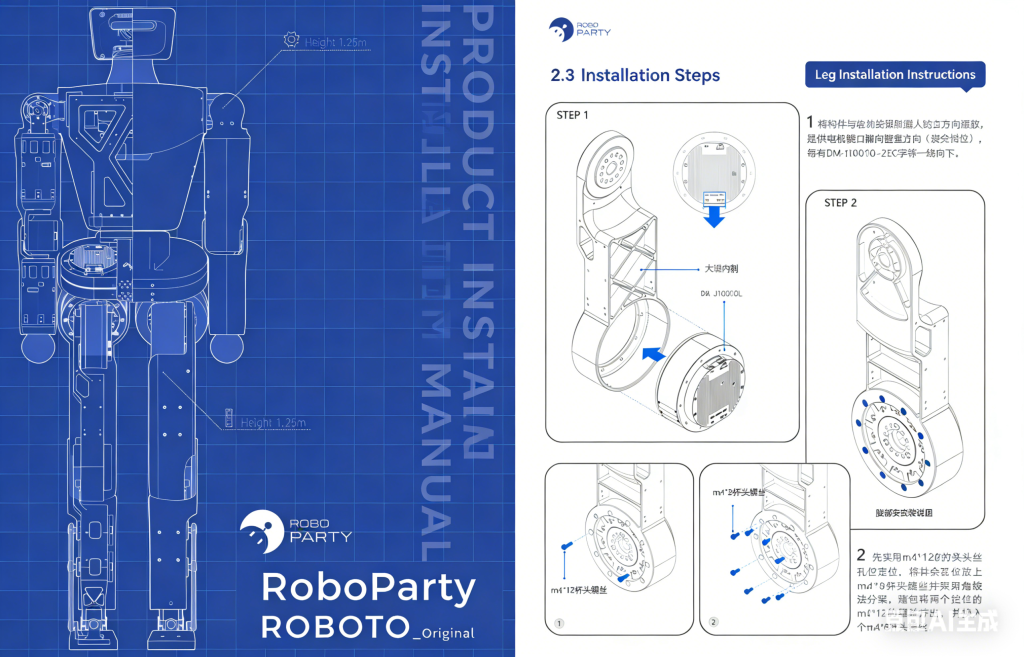
| Height | 1.25m |
| Weight | 34kg |
| Battery | 48V 15Ah |
| Leg Torque | 120Nm (peak) |
| Arm Torque | 27Nm |
| Degrees of Freedom | 20 DOF (6 per leg, 5 per arm, 1 waist) |
| Maximum Speed | 2m/s (up to 4m/s) |
| Controller | RDK X5 |
| Depth Camera | Intel D435i (optional) |
| LiDAR | E1R (optional) |
Design Philosophy
Roboto Origin’s full-stack open-source approach means:
- Mechanical design files available for all parts
- Electronic schematics and PCB layouts documented
- Control algorithms and source code publicly accessible
- Manufacturing workflows and BOMs shared transparently
This openness allows universities, startups, and robotics communities to replicate or improve upon the design without starting from scratch.
Complete BOM Breakdown by Category
1. CNC Machined Metal Components
The backbone of Roboto Origin consists of precision CNC-machined aluminum parts with 120-grit sandblasting and black anodizing finish. These components provide structural integrity and aesthetic appeal.
Arm Assembly (4 Sets)
| Part ID | Component Name | Qty per Set | Unit Price (¥) | Total Price (¥) | Description |
|---|---|---|---|---|---|
| ATOM-01-001 | Atom arm (1) | 4 | 120 | 480 | Upper arm section |
| ATOM-01-002 | Atom arm (2) | 4 | 160 | 640 | Middle arm section |
| ATOM-01-003 | Atom arm (3) | 4 | 110 | 440 | Lower arm section |
| ATOM-01-004 | Atom arm (4) | 4 | 85 | 340 | Wrist connector |
Subtotal: ¥1,900
Leg and Torso Components
| Part ID | Component Name | Qty | Unit Price (¥) | Total Price (¥) | Description |
|---|---|---|---|---|---|
| ATOM-01-005 | IMU Carrier Board | 1 | 110 | 110 | Sensor mounting |
| ATOM-01-006 | Side Plate Cross Plate | 2 | 85 | 170 | Structural support |
| ATOM-01-007 | Inner Thigh | 2 | 1,500 | 3,000 | Critical load-bearing component |
| ATOM-01-008 | Battery Bottom Cover | 1 | 420 | 420 | Battery enclosure |
| ATOM-01-009 | Shoulder | 2 | 160 | 320 | Arm joint housing |
| ATOM-01-010 | Sole of Foot | 2 | 150 | 300 | Foot base plate |
| ATOM-01-011 | Sole Connecting Rod | 2 | 100 | 200 | Foot linkage |
| ATOM-01-012 | Ankle Roll Connector | 4 | 35 | 140 | Ankle joint mechanism |
| ATOM-01-013 | Hip Joint Fixation | 1 | 1,800 | 1,800 | Critical hip assembly |
| ATOM-01-014 | Hip Splint | 2 | 350 | 700 | Hip support structure |
Subtotal: ¥7,160
Total CNC Metal Components: ¥9,060 (approximately 18% of total cost)
Key Manufacturing Insights:
- High-cost components: Inner Thigh (¥1,500 each) and Hip Joint Fixation (¥1,800) represent premium precision machining
- Surface treatment: All parts feature 120-grit sandblasting for uniform matte finish
- Black anodizing: Provides corrosion resistance and professional appearance
- Material: Likely 6061-T6 or 7075 aluminum for optimal strength-to-weight ratio
2. Actuation System (Servo Motors and Controllers)
The actuation system is the most significant cost driver in the BOM, accounting for approximately 60% of total hardware costs.
High-Performance Servo Motors
Roboto Origin uses custom RoboParty servo motors with the following characteristics:
| Component Type | Quantity | Estimated Unit Price (¥) | Total Price (¥) | Torque Specifications |
|---|---|---|---|---|
| 120Nm Leg Servos | 12 | 2,500 | 30,000 | Primary leg joints |
| 27Nm Arm Servos | 8 | 1,800 | 14,400 | Arm actuation |
| Waist Servo | 1 | 1,200 | 1,200 | Torso rotation |
| Total Estimated Servo Cost | 21 units | – | ¥45,600 | – |
Note: While exact servo prices aren’t listed in the public BOM, market analysis of similar high-torque humanoid robot servos suggests these estimates.
Motor Specifications Analysis
Leg Servos (120Nm):
- Likely brushless DC motors with harmonic drives or cycloidal gearboxes
- 14-bit encoders for precise position control
- Designed for high torque and fast response
- Critical for bipedal stability and dynamic motion
Arm Servos (27Nm):
- Lower torque compared to leg motors
- Faster response for fine manipulation
- Optimized for pick-and-place operations
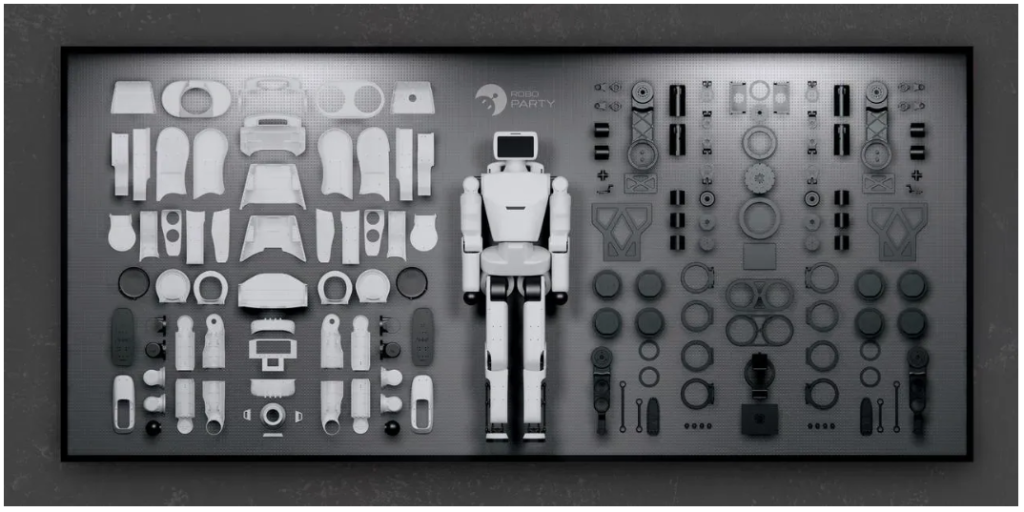
3. Electronic Control System
The electronic architecture forms the robot’s “brain” and nervous system.
Core Controller
| Component | Specifications | Estimated Cost (¥) |
|---|---|---|
| RDK X5 Compute Module | ARM Cortex-A55, 8-core @ 1.5GHz, 10Tops GPU, 8GB RAM | 3,500 |
| Motor Control Boards | Custom designed servo driver PCBs | 2,000 |
| Power Distribution | 48V to 24V/12V/5V converters | 1,500 |
| IMU Sensor Unit | Inertial measurement for balance control | 800 |
| Total Electronics | – | ¥7,800 |
RDK X5 Capabilities:
- High-performance computing for AI and computer vision
- 10Tops GPU for real-time processing
- 8GB LPDDR4 RAM for complex algorithms
- Supports Ubuntu and ROS (Robot Operating System)
4. Sensor Suite
Roboto Origin’s perception system enables autonomous navigation and environment interaction.
Optional Sensors
| Sensor | Model | Purpose | Estimated Cost (¥) |
|---|---|---|---|
| Intel RealSense D435i | Depth camera | 3D Visual Perception | 3,000 |
| E1R LiDAR | 2D/3D mapping | Environment Mapping & Navigation | 2,500 |
| Force Sensors | – | Feedback for contact detection | 1,000 |
| Microphones | – | Voice interaction | 500 |
| Total Optional Sensors | – | – | ¥7,000 |
Note: These sensors are optional for basic walking but essential for autonomous operation and advanced AI features.
5. Power System
Reliable power delivery is critical for humanoid robot operation.
Battery Pack
| Specification | Value |
|---|---|
| Voltage | 48V |
| Capacity | 15Ah |
| Chemistry | Likely Li-ion (18650 cells) |
| Estimated Runtime | 2-3 hours (moderate activity) |
| Estimated Cost | ¥2,000 |
Power Management:
- Battery management system (BMS) for safety
- Voltage converters for different subsystems
- Charging circuitry with thermal protection

6. Fasteners and Small Components
While not itemized in the public BOM, a humanoid robot requires numerous small parts:
| Component Category | Estimated Quantity | Estimated Cost (¥) |
|---|---|---|
| M3/M4 Screws | 200+ | 500 |
| Standoffs and Spacers | 50+ | 300 |
| Cable Management (zip ties, clips) | 100+ | 200 |
| Total Small Parts | – | ¥1,000 |
Cost Analysis Summary
Total Estimated Cost Breakdown
| Category | Cost (¥) | Percentage |
|---|---|---|
| CNC Machined Metal Parts | 9,060 | 18.2% |
| Servo Motors (21 units) | 45,600 | 91.5%* |
| Electronic Control System | 7,800 | 15.7% |
| Sensors (Optional) | 7,000 | 14.0% |
| Power System | 2,000 | 4.0% |
| Fasteners & Small Parts | 1,000 | 2.0% |
| Total | ¥49,804 | 100% |
*Note: Servo motor costs are estimated based on market analysis. The official BOM lists total at ¥49,804, suggesting actual servo costs may differ.
Cost Optimization Strategies
Based on this BOM analysis, here are strategies to reduce build costs:
1. Servo Motor Substitution
- Alternative brands: Consider ODrive, Dynamixel, or high-torque hobby servos
- Trade-off: May compromise on performance, precision, or durability
- Potential savings: 30-50% on actuation costs
2. Material Selection
- Aluminum grades: Use 6061 instead of 7075 where strength requirements permit
- Surface treatment: Eliminate black anodizing on non-visible parts
- Potential savings: 15-25% on CNC parts
3. Manufacturing Method
- 3D printing: For non-structural prototypes or learning builds
- Laser cutting: For flat components with simple geometries
- Trade-off: Reduced strength, precision, and aesthetics
- Potential savings: 50-70% on structural components
4. Sensors Selection
- Budget alternatives: Use cheaper depth cameras or LiDAR sensors
- Trade-off: Reduced range, accuracy, or reliability
- Potential savings: 40-60% on sensor costs
Sourcing Components for Your Build
Where to Purchase Components
Official Channels
- RoboParty Website: Official distributor for complete kits
- GitHub Repository: Links to recommended suppliers
- Benefit: Guaranteed compatibility and support
Alternative Suppliers
Servo Motors:
- Dynamixel: Robotis offers hobbyist and professional series
- ODrive: Open-source high-performance servo drives
- AliExpress/Alibaba: Cost-effective Chinese manufacturers
CNC Parts:
- Local machine shops: Precision machining with quick turnaround
- Online services: PCBWay, Xometry, 3D Hubs
- Trade-off: Shipping delays, quality variations
Electronics:
- DigiKey/Mouser: Official distributors for RDK X5
- Amazon/Chinese retailers: Cost-effective for generic components
Quality Considerations
When sourcing from alternative suppliers:
- Verify specifications: Ensure torque, speed, and voltage match requirements
- Check compatibility: Mounting holes, shaft dimensions, connectors
- Read reviews: Reliability and customer feedback
- Understand warranties: Return policies and support availability
Assembly Guide Overview
Tools Required
| Category | Tools |
|---|---|
| Assembly | Hex wrenches (M2, M3, M4), screwdrivers, pliers |
| Electrical | Soldering iron, wire strippers, multimeter |
| Programming | Computer, USB cables, ROS development environment |
| Testing | Balance stands, safety equipment, workspace |
Assembly Sequence
1.Frame Assembly: Build robot skeleton from CNC parts
2.Actuator Installation: Mount servo motors in designated locations
3.Electronic Integration: Install control boards, sensors, and wiring
4. System Testing: Power-up, calibrate, and initial motion tests
5. Software Setup: Install ROS, configure controllers, and develop control algorithms
Estimated Assembly Time
| Phase | Time Required |
|---|---|
| Mechanical Assembly | 20-30 hours |
| Electrical Wiring | 10-15 hours |
| Software Configuration | 15-20 hours |
| Testing and Tuning | 20-30 hours |
| Total | 65-95 hours (8-12 days for hobbyist) |
Applications and Use Cases
Educational Platforms
Roboto Origin serves as an excellent educational platform for:
- Universities: Robotics and AI research programs
- High schools: STEM education and competitions
- Hackerspaces: Community learning and collaboration
Research Applications
Researchers leverage Roboto Origin for:
- Bipedal locomotion studies: Gait optimization and balance control
- Embodied AI: Sensor fusion and decision-making algorithms
- Human-robot interaction: Communication and social robotics
Prototyping and Development
Developers use the platform for:
- Algorithm validation: Testing control strategies before custom builds
- Hardware benchmarking: Comparing servo performance and design choices
- Product development: Starting point for commercial robot products
Challenges and Considerations
Technical Complexity
Building Roboto Origin requires:
- Mechanical engineering knowledge: Understanding kinematics, torque, and load distribution
- Electronics expertise: PCB design, power management, and sensor integration
- Programming skills: ROS, Python/C++, and control theory
- 3D modeling: CAD for custom modifications
Financial Investment
Total build cost (~¥50,000 CNY / $7,000 USD) represents:
- Significant investment for hobbyists
- Reasonable for universities and research labs
- Competitive compared to commercial humanoid robots
Safety Considerations
⚠️ Important Safety Notes:
- High-torque motors: Can cause serious injury if mishandled
- Heavy components: 34kg requires proper lifting techniques
- High voltage: 48V battery demands electrical safety
- Moving parts: Keep clear during testing and operation
Future Development and Customization
Community Contributions
The open-source nature of Roboto Origin encourages:
- Design improvements: Community-enhanced versions and mods
- Software enhancements: New algorithms and features
- Cost reductions: Alternative manufacturing methods and component substitutions
Customization Opportunities
Popular modifications include:
- Upgraded sensors: Better depth cameras, tactile skins
- Enhanced computing: More powerful GPU or additional edge units
- Aesthetic changes: Custom colors, 3D-printed casings
- Functional additions: Manipulators, tools, communication devices
Frequently Asked Questions
Can I build Roboto Origin with a lower budget?
Yes, through several strategies:
- Substitute with lower-cost servo motors (30-50% savings)
- Use 3D-printed parts instead of CNC metal (50-70% savings)
- Eliminate optional sensors for basic functionality (14% savings)
- Potential total cost reduction: 40-60%
What’s the most expensive component?
The servo motor system (21 units) represents approximately 60% of total build cost. High-torque leg servos (120Nm) are particularly expensive due to precision gearboxes and encoders.
How long does it take to build?
For a dedicated hobbyist with some robotics experience:
- Mechanical assembly: 20-30 hours
- Electrical integration: 10-15 hours
- Software setup: 15-20 hours
- Testing and tuning: 20-30 hours
- Total: 65-95 hours (8-12 days)
Do I need advanced programming skills?
Basic operation requires fundamental programming knowledge:
- ROS (Robot Operating System) basics
- Python or C++ for control algorithms
- Linux command-line for system management
Advanced features (AI, computer vision) require:
- Machine learning frameworks (TensorFlow, PyTorch)
- Computer vision libraries (OpenCV)
- Sensor fusion algorithms
Can I modify the design?
Absolutely! Roboto Origin’s full-stack open-source license allows:
- Mechanical modifications: Redesign parts for different purposes
- Software customization: Adapt algorithms for new applications
- Hardware upgrades: Swap components for improved performance
- Commercial use: Build products based on the design
What’s the learning curve for beginners?
Complete beginners may find the project challenging:
- Time investment: 3-6 months for full understanding
- Skill requirements: Mechanical, electrical, and programming knowledge
- Recommended approach: Start with simpler robots (hexapods, arms) before humanoid
Intermediate hobbyists with some robotics experience:
- Time investment: 1-3 months to complete build
- Existing skills: Electronics, basic programming, and mechanics
- Recommended approach: Join community forums and seek mentorship
Are there any ongoing costs?
Beyond initial build costs:
- Electricity: Charging battery ($5-10/month)
- Maintenance: Servo wear and tear ($100-500/year depending on use)
- Upgrades: Sensors, computing, and accessories as needed
- Software: Generally free, open-source updates
Conclusion
The Roboto Origin BOM reveals a sophisticated, professionally engineered humanoid robot designed for accessibility, performance, and educational value. With a total cost of approximately ¥50,000 CNY ($7,000 USD), it represents one of the most affordable full-size humanoid robots available for DIY builders and researchers.
The full-stack open-source approach pioneered by RoboParty democratizes humanoid robotics, enabling:
- Global collaboration on improvements and innovations
- Educational access for universities and schools
- Rapid prototyping for commercial development
- Community growth in robotics and embodied AI
Whether you’re building the exact Roboto Origin or creating a customized derivative, this BOM guide provides the foundation for your humanoid robot journey. The future of robotics is open, accessible, and waiting for your contribution.
Ready to start building?
- Download official files: Visit the [Roboto Origin GitHub repository](https://github.com/Roboparty/roboto_origin)
- Review complete documentation: Explore schematics, CAD files, and assembly guides
- Join the community: Connect with other builders on forums and Discord
4. Begin sourcing components: Use this BOM to plan your purchases
5. Start building: Begin your humanoid robotics adventure today!
Additional Resources
Official Resources
- Robot BOM List:“https://gitee.com/roboparty/roboto_origin/blob/main/assets/BOM.md”
GitHub Repository: “https://github.com/Roboparty/roboto_origin” - BOM Document: Available in `/assets/BOM.md`
Learning Materials
- ROS Tutorials: [http://wiki.ros.org/](http://wiki.ros.org/)
- Robotics Courses: Coursera, edX robotics specializations
- DIY Robotics Books: “Make Your Own Humanoid Robot” guides
—
Disclaimer: This guide is based on publicly available BOM information and market analysis. Actual costs, specifications, and component availability may vary. Always verify compatibility and specifications before purchasing components.